Qube-Servo 2
?
Projektleitung:? Prof. Dr. Sebastian Altmeyer
?
Beteiligte Wissenschaftler:? Tim Braun
?
?
Kurzbeschreibung
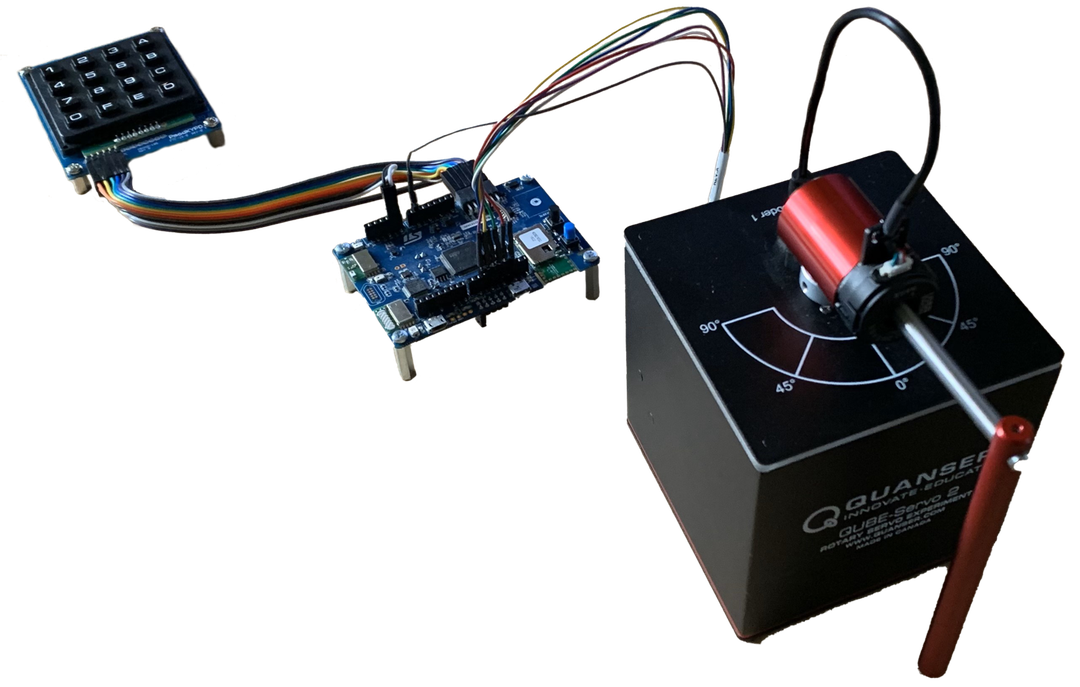
Wir haben an unserem Lehrstuhl ein inverses Pendel der Firma Quanser.
Für dieses haben wir eine Steuerung auf einem STM32-L475 implementiert, wodurch das Pendel aufgeschwungen und stabilisiert wird. Dies geschah mithilfe von Codegenerierung eines MATLAB/Simulink Modells, welches die Logik für die Pendelregelung enth?lt.
Der Microcontroller selbst benutzt das Real Time Operating System ThreadX.
?
Wir interessieren uns insbesondere für das Verhalten des System, wenn es in eine ?berlastsituation ger?t. Daher haben wir verschiedene Deadline-Miss-Handling Strategien implementiert und die resultierende Performance verglichen. Durch die Button Matrix kann die Strategie und die Art der simulierten ?berlast eingestellt werden.
?
?ber unsere Ergebnisse haben wir ein Paper geschrieben, welches teil des?IEEE 31st Real-Time and Embedded Technology and Applications Symposium (RTAS 2025)?war.